
In this chapter, we are going to cover how to check whether 3D shapes are intersecting. The following intersection tests will be covered:
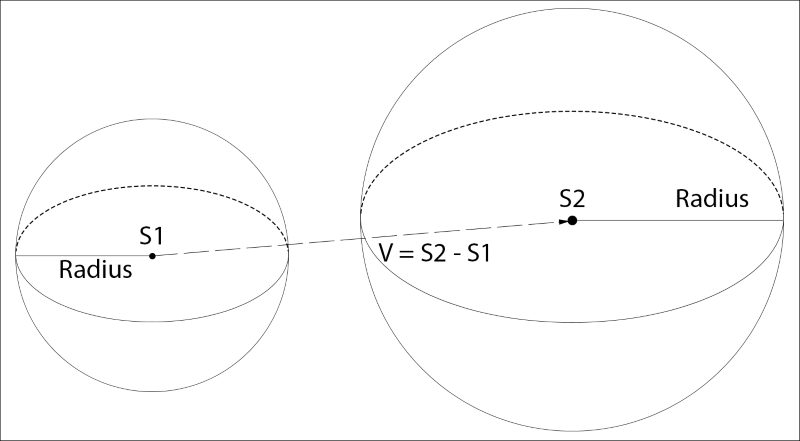
Sphere to sphere
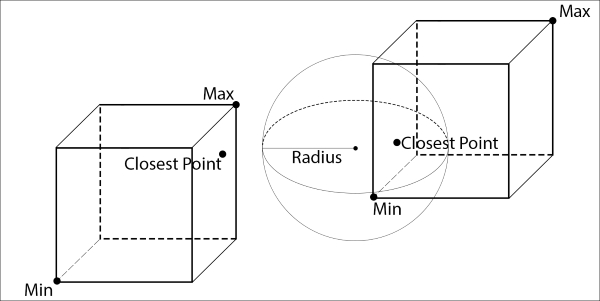
Sphere to AABB
Sphere to OBB
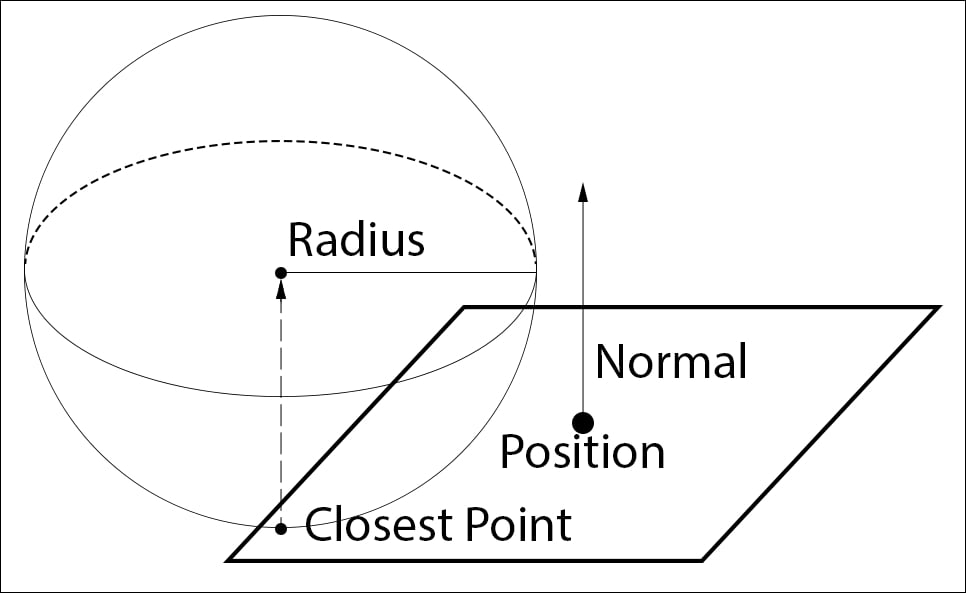
Sphere to plane
AABB to AABB
AABB to OBB
AABB to plane
OBB to OBB
OBB to plane
Plane to plane