
In this chapter, we will explore some rendering related functionality. We are going to explore creating a camera and controlling that camera to help us visualize the physics demos that we will create in the next chapter. This chapter will cover the following topics:
Camera object
Camera controls
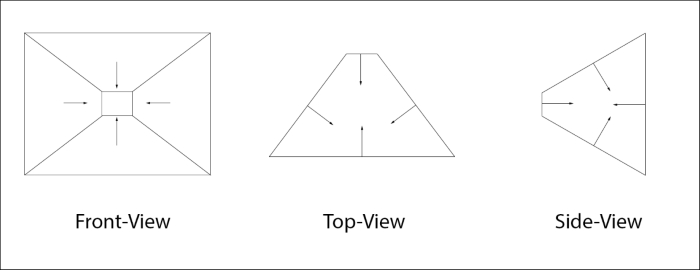
Frustum object
Frustum from matrix
Sphere in frustum
Bounding Box in frustum
Octree culling
Picking