
This chapter focuses on springs and joints. A spring will exert some force on one or more objects to create a spring like motion. A joint is a constraint that limits the motion of rigidbodies. Throughout the chapter, we will cover the following topics:
Particle Modifications
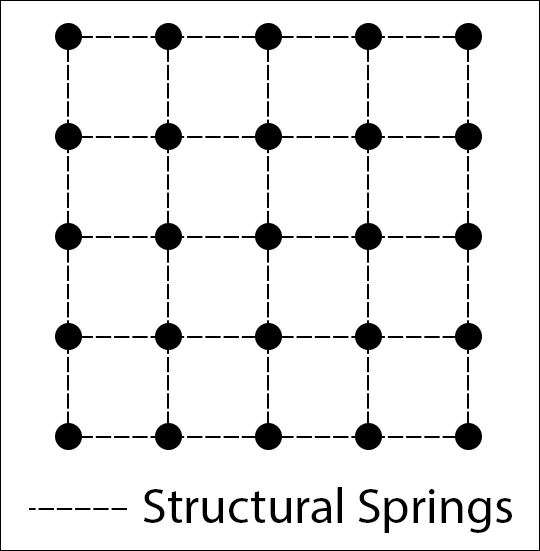
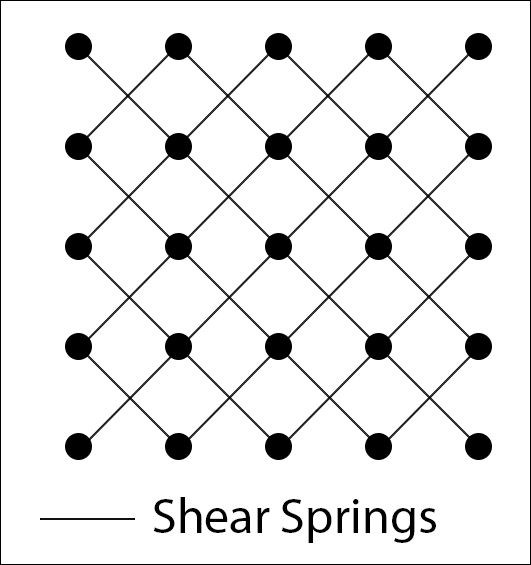
Springs
Cloth
Physics System Modifications
Joints