

We're not going to bore you with all of the calculations involved in computing your potential flight times. Instead, there's an extremely handy online calculator for helping you with your multicopter designs at https://www.ecalc.ch/xcoptercalc.php.
The results we get with this configuration are shown in the following screenshot:
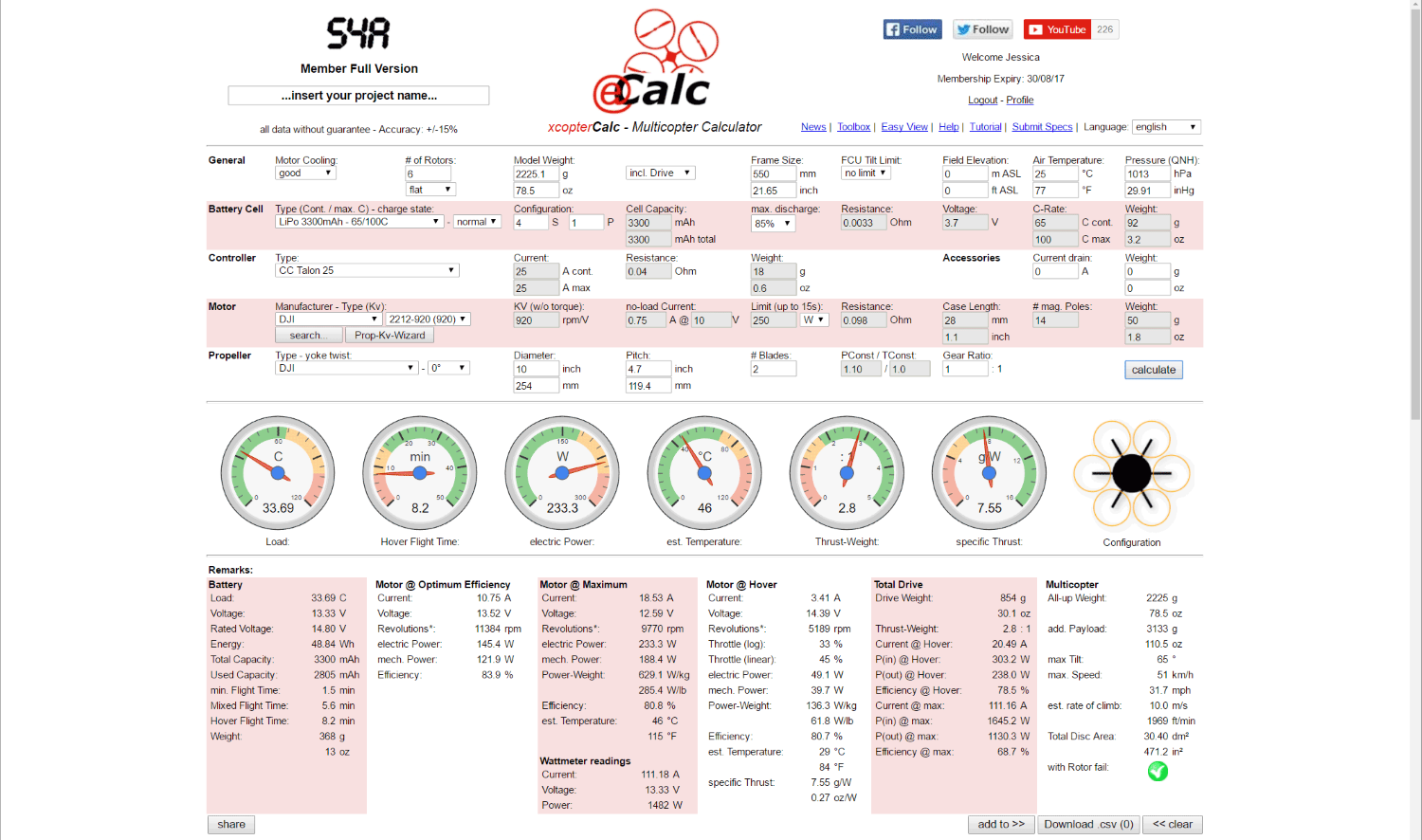
I know the font is really small to read. The bottom line? We get about 5.5 minutes of flight time. If we were going into a production prototype, we'd spend a ton of time (and probably a lot more money) tweaking our parts until we reach just the right balance of flight time and payload. But this is certainly not a production prototype. Not with the camera we'd want to eventually carry, and nowhere near the size we'd eventually want to go for. For a simple proof of concept, we can deal with 5-minute flights. If we really want, we can bump that up to just over 7 minutes with a 5,000 mAh battery. But that may overload our motors if we ever go full throttle...