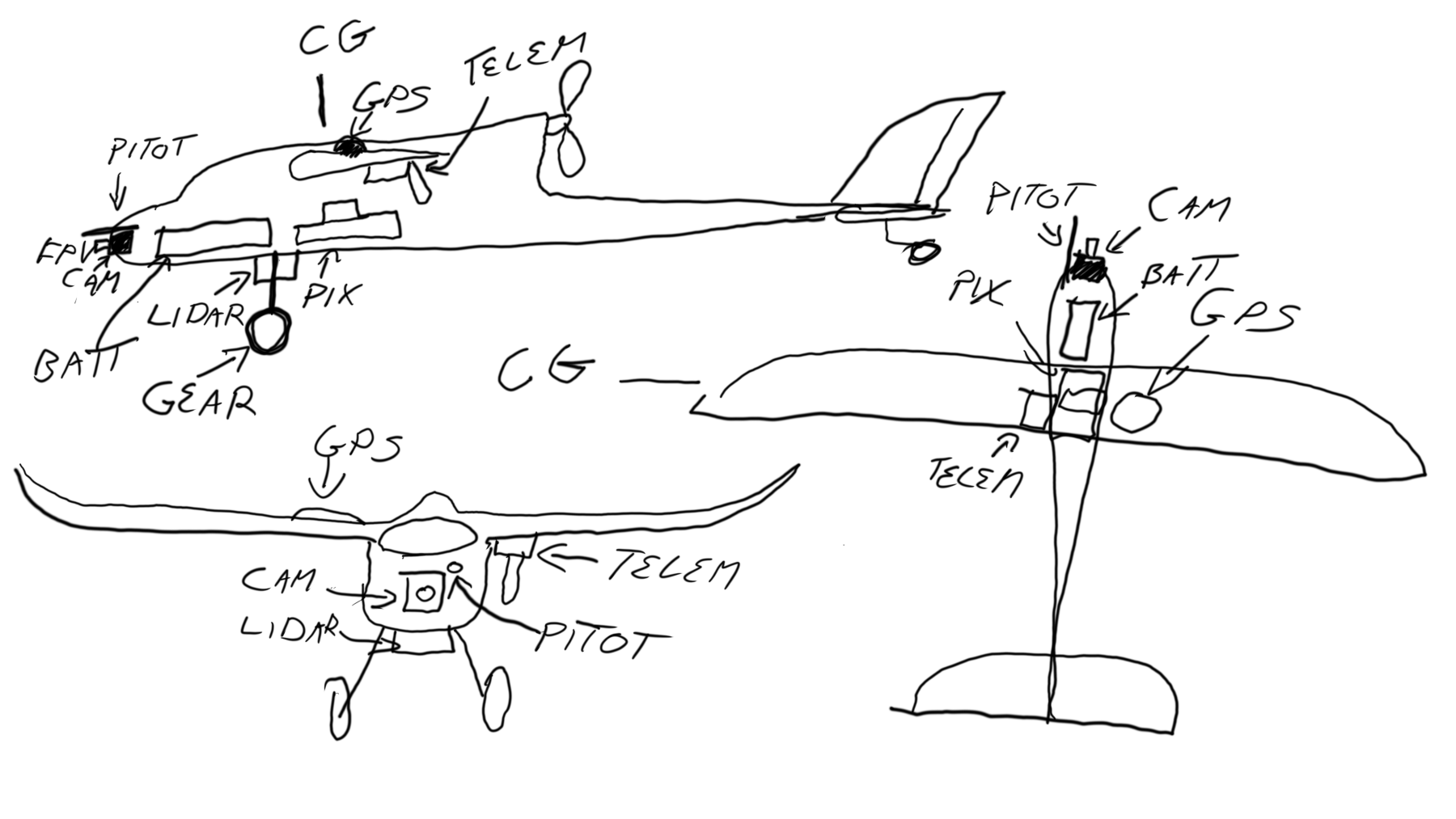

Wow for a holy grail, she sure is one ugly pig, right? Well, prototypes just aren't usually pretty. So, why is a fixed wing drone (like the airplane in the following image) considered a holy grail?

The answer is pretty simple, actually. Airplanes need to keep moving in order to stay airborne. Go too slow, and you stall (a fancy word for fall from the sky until you build up speed again except that it's usually vertical speed, and vertical speed is going down).
With multicopters, tuning them is fairly easy: take it off, hover just outside of ground effect (OGE), and let it twitch around a bit. If it's too crazy, just land it, reset the settings, and repeat. Since an airplane is constantly moving tuning can be quite a bit more hazardous to the aircraft.
While tuning fixed wings, I've had them turn into lawn darts, porpoise like dolphins jumping out of the ocean, and (as stated in a previous chapter) blow their wings right off. So, it's important while...