

3D printers can make a number of useful and practical things. But what's the point if you can't have fun too? This blueprint is for a 3D printed poseable robot in multiple parts that connects together with 3D printed connectors. It will be connected with two types of connectors, a pin connector that will do the majority of the joints, and a ball and socket connector for the head.
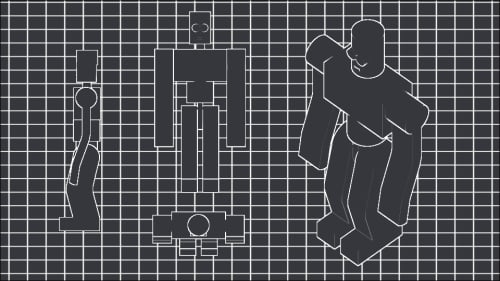
Before this project begins a lot of planning has to be done. Often projects list this start long before the modeling program opens up. This should be considered normal for any design project. Fortunately in this case the planning is already done and the modeling can begin.
The straight pin connector used here is loosely based on a connector created by Tony Buser on Thingiverse; modified to fit this project. This connector relies on the flexible nature of the plastic to get the head into a smaller hole, until it is past the opening, and can spring back to hold the part in place. When designing...






