As we have gone through use cases that are catered for by the use of drone technology, here, we will study different types of drones that have been built for the sake of different application requirements such as high endurance, long range, high altitude, and so on. By doing this, we will get to know about the different kinds of drones and later build an understanding of their development. A glimpse at various kinds of drones is covered in the following section.
Types of drones and their specifications
In this section, we will study the various types of drones, their key functionality, and how they are different from each other.
Multirotor
A multirotor is a motor-propeller-based drone. The major elements to produce force and lift in the air are motors and propellers attached to them. This produces thrust in the drone and helps to lift the system’s load.
Based on the number of motors, these drones are classified as follows:
- Two motors or bi-copter: A bi-copter is a multirotor with two rotors placed on each side of the center. These systems are unidirectional systems and capable of lifting less load with low endurance and control. Hence, these systems are not used much:
Figure 1.1 – A bi-copter
- Three motors or tri-copter: A tri-copter has three arms and lift-generating elements at the end of each arm, placed at 120 degrees to each other. These types of drones are small and not load-carrying but can be used for short distances in inspection and surveillance:
Figure 1.2 – A tri-copter
- Four motors or quadcopter: Quadcopters are the most famous drone configurations, used across the world. These are considered the most stable and easy-to-control drones. The dynamics of the drones make them easy to maneuver across the 3D space and give them stability and speed across long ranges and high altitudes. These configurations are also used to carry up to a few kilograms of payload with them:
Figure 1.3 – A quadcopter
- Six motors or hexacopter: Hexacopters are one of the most famous configurations after quadcopters. As the name suggests, they have 6 arms placed at 60 degrees to each other. These configurations are used for more stable flight and are able to carry more load. Eventually, they offer less endurance under the same power than a quadcopter:
Figure 1.4 – A hexacopter
- Eight motors or octocopter: An octocopter, as the name suggests, has 8 arms placed at 45 degrees to each other. It is an extended version of a hexacopter that can lift more weight and comes in large sizes. These are aerodynamically more stable but also more heavy and power-hungry vehicles:
Figure 1.5 – An octocopter
- Eight motors (in Quad) or octa-quad: The octa-quad model is not very famous in the commercial market. It is a good configuration carrying more weight in the small configurations. It’s a quadcopter with four arms and two motors placed on the top and bottom of each arm for producing more thrust in less form factor. These types of drones are mainly used to maintain a good size-to-weight ratio:
Figure 1.6 – An octa-quad
- 12 motors (in Hexa) or deca-hexa copter: The deca-hexa, as the name suggests, has 12 motors on 6 arms placed upside down. These configurations are used for larger drones, such as passenger-carrying drones or heavy cargo drones. These have bigger-sized motors and bigger load capacity and form factor:
Figure 1.7 – A deca-hexa copter
The preceding configuration is used as per the decided payload, load-carrying capacity, and applications.
Fixed-wing drone
A fixed-wing drone, as the name suggests, is a standard airfoil wing-based design where the wing serves as a key lift generator for the system and a single motor (push/pull) helps to cruise in the air. The cruise speed helps to generate adequate lift via wings to travel in the air, and control surfaces work to give direction in the air:
Figure 1.8 – A fixed-wing drone
Fixed-wing VTOL or hybrid drone
Vertical take-off and landing (VTOL) aircraft, also called hybrid aircraft, is assisted by four motors to lift off in the air and later transition into a fixed-wing aircraft. This type of drone does not require a long runway unlike fixed-wing drones. It take off and land like a multicopter from a single place and cruises like a fixed-wing aircraft:
Figure 1.9 – A fixed-wing VTOL
Tilt-rotor drone
A tilt-rotor drone comes under the category of fixed-wing VTOL hybrid drones that take off and land like a multirotor and cruise like a fixed-wing drone. The only difference between these drones and fixed-wing VTOL drones is that these drones work on the principle of differential thrust and have common motors for cruise and take-off. The same motors are used as take-off lifter motors, change their angle from 90 degrees to 180 degrees during transition, and are used as cruise motors.
These drones give much more efficiency than a fixed-wing VTOL since the number of motors is reduced and power consumption is also reduced:
Figure 1.10 – A tilt-rotor hybrid drone
Hence, we have seen different types of drones. These drones can be built in different weight and size categories, but to differentiate them based on their weight profile, the Directorate General of Civil Aviation (DGCA) in India has classified drones into five categories:
- Nano: Any drones less than or equal to 250 grams come under the category of nano drones
- Micro: Any drones between 250 grams and 2 kilograms come under the category of micro drones
- Small: Any drones between 2 kilograms and 25 kilograms come under the category of small drones
- Medium: Drones that are greater than 25 kilograms and less than or equal to 150 kilograms
- Large: Drones that are greater than 150 kilograms
We have now studied different types of drones based on their structure and application, but we haven’t yet studied what’s actually inside the drone and the systems it contains. In the following sections, we will understand the composition of a drone and bifurcate it into different categories.
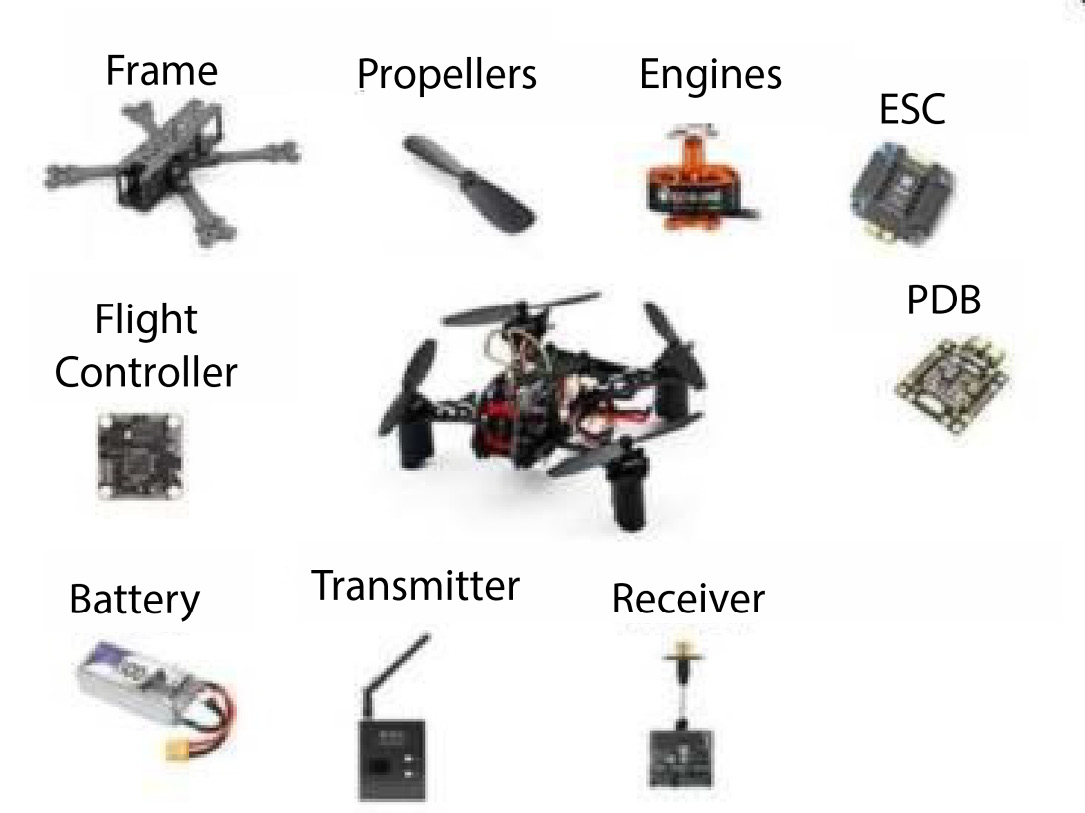
System composition of a UAV
A UAV has many systems and subsystems that enable it to fly in the air and do missions automatically with safety and precision. These systems are a combination of hardware and software that perform their respective tasks to keep the system under control and stable in the air:
Figure 1.11 – Overview of a drone system
Now that we have seen the system composition of a UAV, let us look at the major mechanical and structural components of drones.