
In this chapter, we are going to learn about stereo vision and how we can reconstruct the 3D map of a scene. We will discuss epipolar geometry, depth maps, and 3D reconstruction. We will learn how to extract 3D information from stereo images and build a point cloud.
By the end of this chapter, you will know:
What is stereo correspondence
What is epipolar geometry
What is a depth map
How to extract 3D information
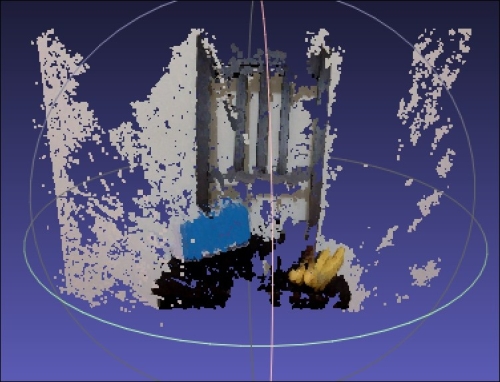
How to build and visualize the 3D map of a given scene