

For now, we are able to control our mobile robot, but except if we directly look at it, we have no way of knowing if there is an obstacle in front of it.
This is where ultrasonic sensors come into play: they are an easy, inexpensive way to know precisely if there is something in front of the mobile robot, and at what distance. In this recipe, we'll add an ultrasonic sensor to our robot and integrate it into the interface.
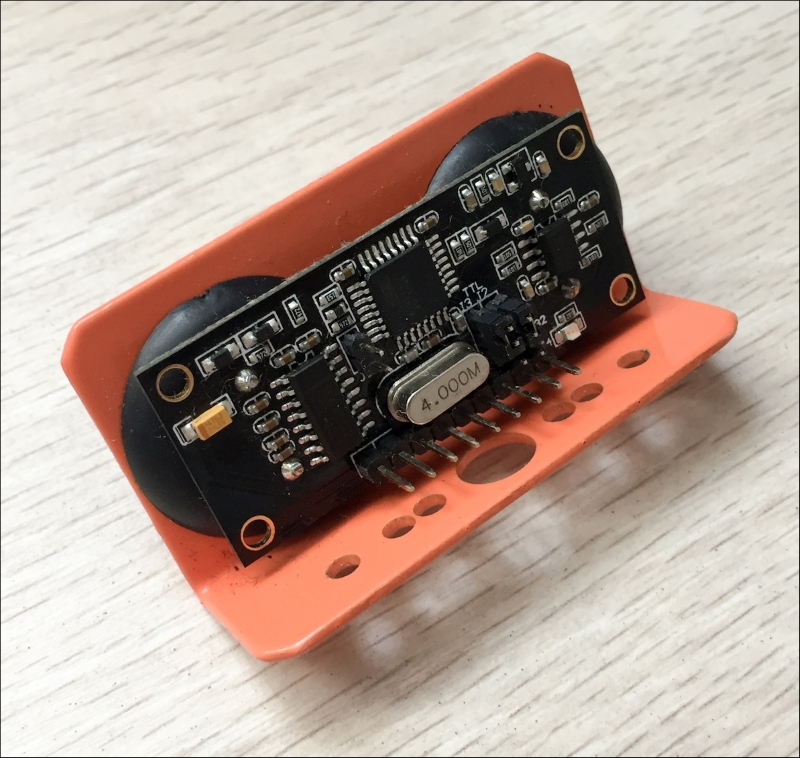
The first thing you need is, of course, an ultrasonic sensor. For this project, I used an URM37 ultrasonic sensor from DFRobot:

This is the back of the sensor, showing all the pins:
You can now mount the sensor on the robot's chassis, putting the sensor in front of the robot.
Then, you can refer to the documentation at http://www.dfrobot.com/wiki/index.php?title=URM37_V4.0_Ultrasonic_Sensor_(SKU:SEN0001) to find the pins of the sensor.
Basically, you need to connect the VCC pin to the VCC pin of the Arduino board, GND to GND, and pin number...