Chapter 10. System Dynamics
Through the previous chapters we've spent time talking a lot about individual functionality that we can add to our robotic projects. In this chapter, we'll talk about how to integrate these different parts into a single system.
We've spent lot of time on individual functionality, and your robotic projects now have lots of functionality that we can add to our projects. This chapter will bring all of these parts together into a framework that allows the different parts to work together.
You don't want the robot to just walk, talk, or see. You want it to do all of these in a coordinated package. In this chapter, you'll learn how to programmatically connect all of these individual capabilities and make your projects seem intelligent.
In this chapter, we will:
Finally we're done purchasing the HW. In this chapter, we'll be adding functionality via SW. You'll need ample storage space for an array of new SW. First, let's check how much space you have on your memory card. You should install discus: a program that will let you see how much disk space you...
Creating a general control structure so capabilities can communicate
Now that you have a mobile robot, you want to coordinate all of its different abilities. Let's start with the simplest approach: using a single control program that can call other programs and enable all the capabilities.
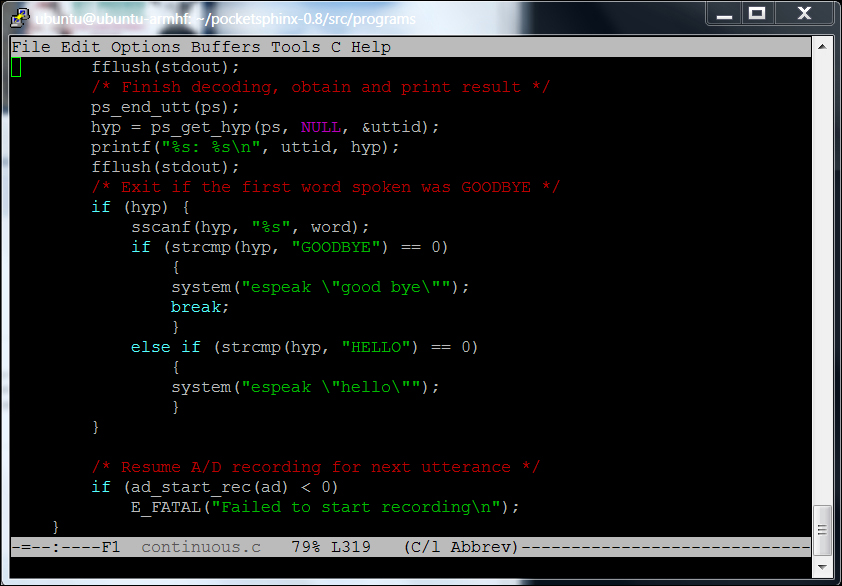
You've already done this once. In Chapter 3, Providing Speech Input and Output, you edited the continuous.c code to allow it to call other programs to execute functionality. Here is the code that we used, found in the /home/ubuntu/pocketsphinx-0.8/programs/src/ directory.
The functionality that is important to us is the system("espeak \"good bye"\"");"\""); line of code. When you use the system function call, the program actually calls a different program, in this case the espeak program, and passes it to the good bye parameter so that the words good and bye come out of the speaker.
Here is another example, this time from Chapter 5, Making the Unit Mobile – Controlling Wheeled Movement...
Now you can coordinate complex functionality for your robot. Your robot can walk, talk, see, hear, and even sense its environment, all at the same time.
As you can see, communicating between different aspects of our project can be challenging. You are probably used to using an operating system that provides you with much of the basic functionality that you need for your computer use. In this section I'm going to introduce you to a special operating system that is designed specifically for use with robotics projects, the Robot Operating System (ROS). This operating system sits on top of Linux and provides some interesting functionality.
ROS is fortunately free and open source. It is a very complex set of functionalities, but if you spend some time learning it, you can start using some of the most comprehensive functionality being developed in robotics research today.
To install ROS for the BeagleBone Black, go to http://wiki.ros.org/groovy/Installation/UbuntuARM. This gives you a step-by-step set of instructions to download and install the ROS onto your BeagleBone Black. Then also select Ubuntu on ARM, which is the architecture...
 Argentina
Argentina
 Australia
Australia
 Austria
Austria
 Belgium
Belgium
 Brazil
Brazil
 Bulgaria
Bulgaria
 Canada
Canada
 Chile
Chile
 Colombia
Colombia
 Cyprus
Cyprus
 Czechia
Czechia
 Denmark
Denmark
 Ecuador
Ecuador
 Egypt
Egypt
 Estonia
Estonia
 Finland
Finland
 France
France
 Germany
Germany
 Great Britain
Great Britain
 Greece
Greece
 Hungary
Hungary
 India
India
 Indonesia
Indonesia
 Ireland
Ireland
 Italy
Italy
 Japan
Japan
 Latvia
Latvia
 Lithuania
Lithuania
 Luxembourg
Luxembourg
 Malaysia
Malaysia
 Malta
Malta
 Mexico
Mexico
 Netherlands
Netherlands
 New Zealand
New Zealand
 Norway
Norway
 Philippines
Philippines
 Poland
Poland
 Portugal
Portugal
 Romania
Romania
 Russia
Russia
 Singapore
Singapore
 Slovakia
Slovakia
 Slovenia
Slovenia
 South Africa
South Africa
 South Korea
South Korea
 Spain
Spain
 Sweden
Sweden
 Switzerland
Switzerland
 Taiwan
Taiwan
 Thailand
Thailand
 Turkey
Turkey
 Ukraine
Ukraine
 United States
United States