In this chapter, we will use the Intel Galileo for a completely different application than we have so far. Indeed, we will use the board as be the "brain" of a mobile robot.
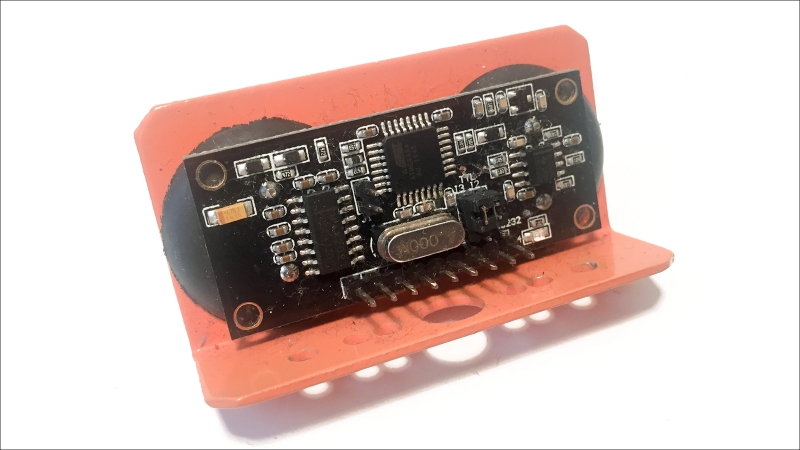
We are first going to see how to assemble the robot. We will mount the Galileo board on the robot, and also assemble an ultrasonic sensor on the robot.
Then, we will program the robot to do some basic tasks. First, we will do a complete test of the robot to check whether the Galileo board is correctly wired with the robot. Then, we will program the robot to perform a simple navigation task that is moving around while avoiding obstacles in front of the robot using the ultrasonic sensor. Let's dive in!