






















































Steering a robot
We've made the robot drive forward. But how do we steer it left or right? Let’s explore a few ways to steer robots. We can then settle on one that our robot will use and write some test code to demonstrate it.
Types of steering
The most common techniques for steering a wheeled vehicle (including a robot) fall into two major categories—steerable wheels and fixed wheels. We’ll look at these and their variants below.
Steerable wheels
In movable wheel designs, one or more wheels in a robot face in a different direction from the others. When the robot drives, the differently positioned wheel makes the robot turn. There are two common styles of movable wheel steering on a robot, as shown in Figure 6.1:
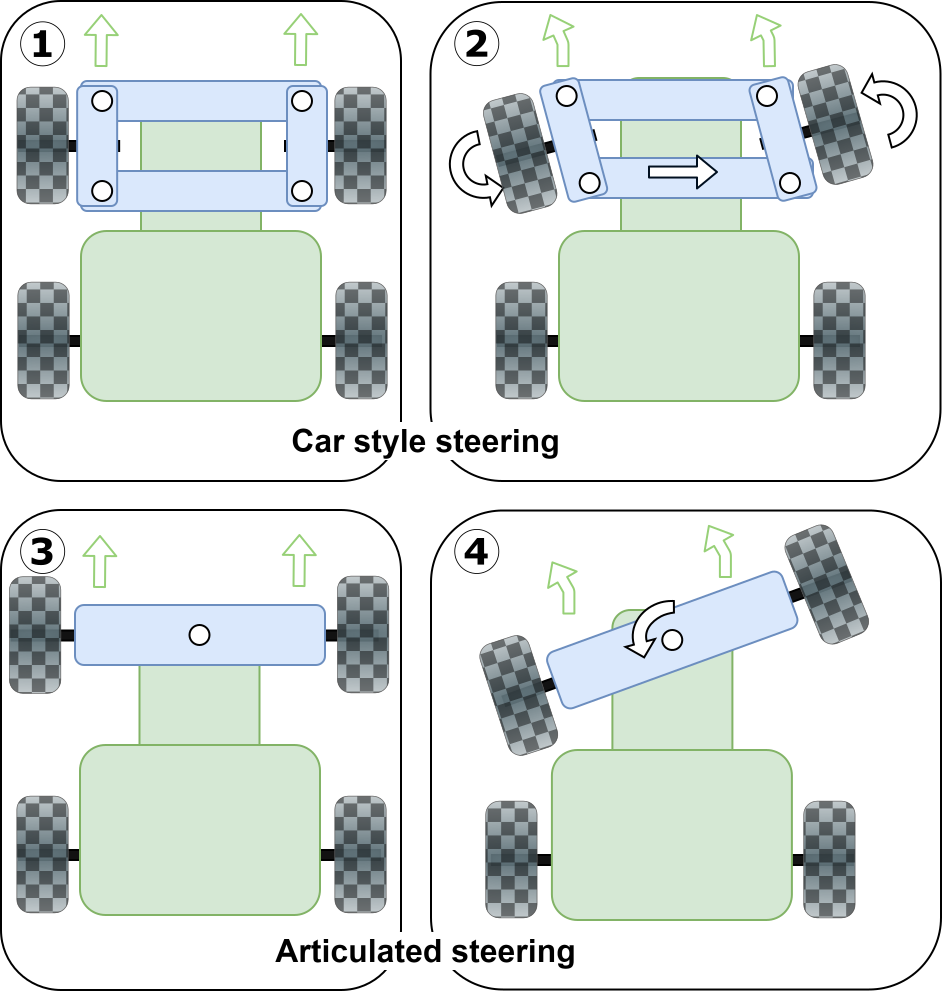
The green arrows in Figure 6.1 show the direction of movement. The white arrows show changes to the shape of the robot and the angle of the wheels. Panel 1 shows the type of steering typically used...






