






















































Connecting independent power
We are powering this robot from a single large USB power bank. We will strap this into the lower chassis plate, and wire it into the Raspberry Pi.For this step, you will need:
- The robot from the previous steps
- The Nanowave 3 5000 mAh USB C & A power bank
- The USB cable that came with the power bank
- Velcro ties
See the following image for strapping this into the robot:
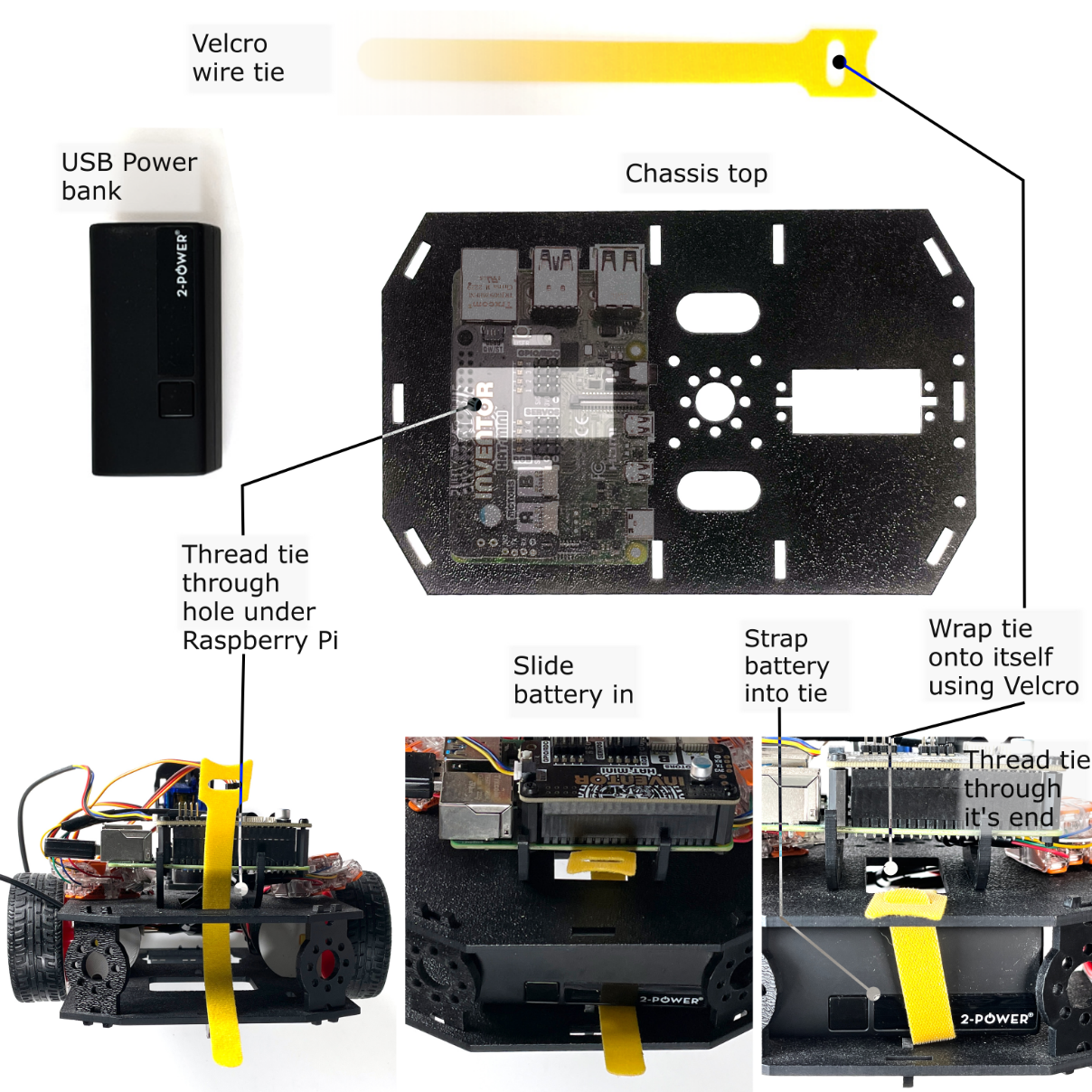
The preceding images show how to attach the battery. The initial image shows the velcro tie next to a top chassis plate, with the Raspberry Pi shaded out so the slots can be seen underneath. You will do this on the plate already in situ.Thread the large end of the tie up through the slot beneath the Raspberry Pi, then slide the battery underneath. Wrap the tie around the battery and pull it tight. Position the battery so that the button and lights face the rear of the robot, making them visible from the outside. You can then add the USB cable...






